Die Micromouse benötigt eine präzise Regelung, um sicher durch das Labyrinth zu navigieren:
- Geradeaus fahren
- Kurven fahren
- Abstand zu den Wänden halten
1. Reglerstruktur
Die Regelung basiert auf einem PD-Regler zur Steuerung von Position und Winkel. Trapezförmige Geschwindigkeitsprofile dienen als Eingangsgröße für die Bewegungssteuerung. Encoder erfassen die Position und den Winkel der Maus, während die IR-Sensoren zur Winkelkorrektur beitragen, um den Abstand zu den Wänden konstant zu halten.
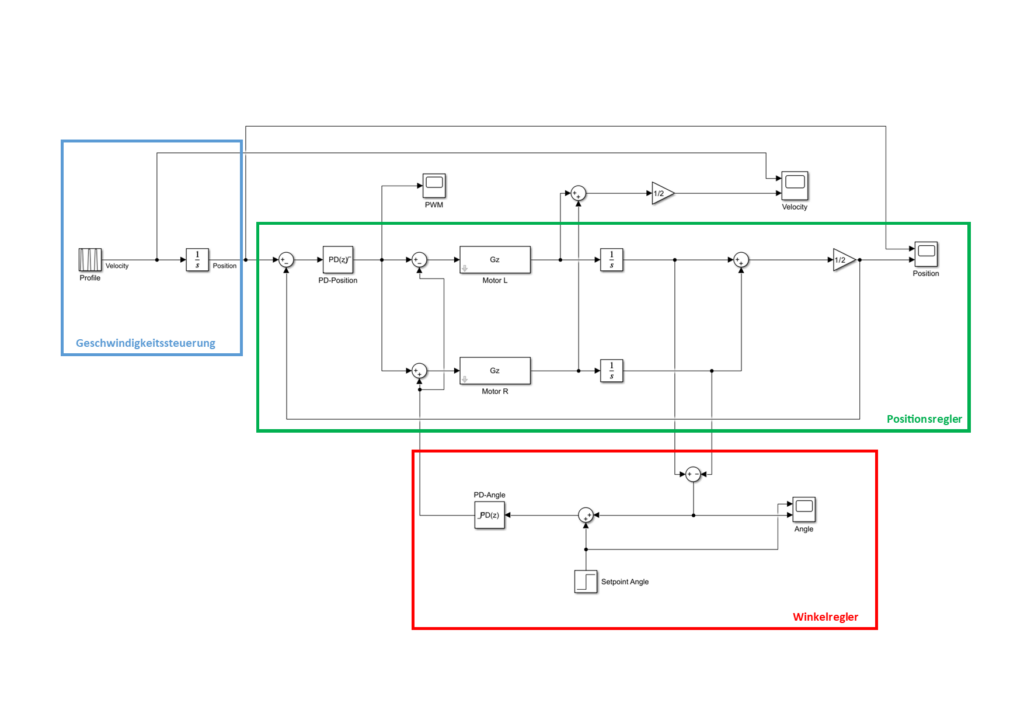
PD-Regler
- P-Anteil: Verstärkender Faktor, um Sollwert zu erreichen.
- D-Anteil: Korrigiert schnelle Änderungen und vermeidet Überschwingen.
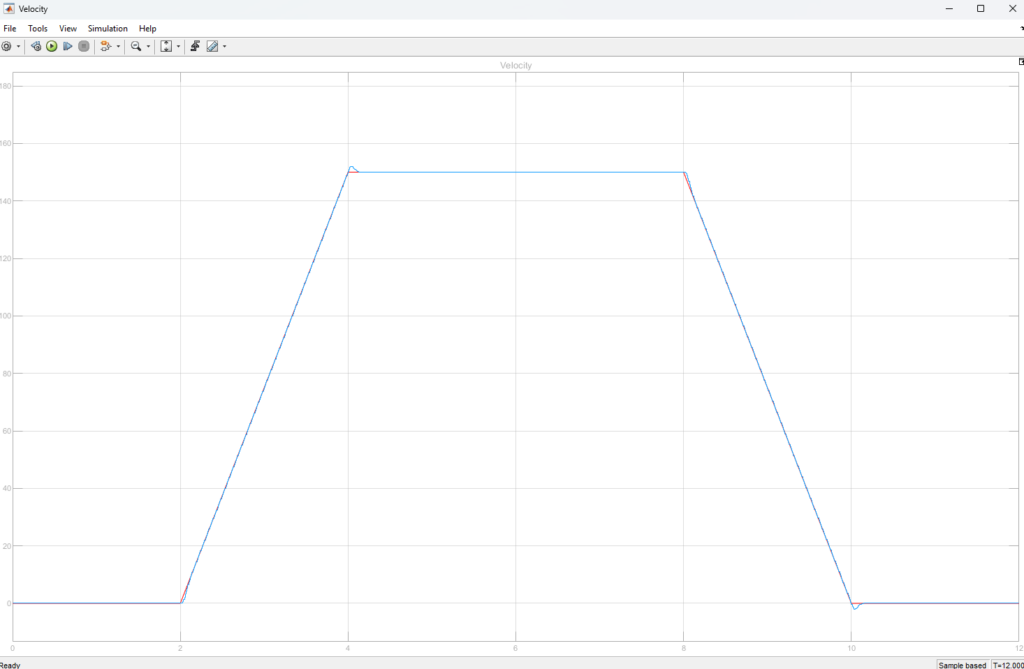
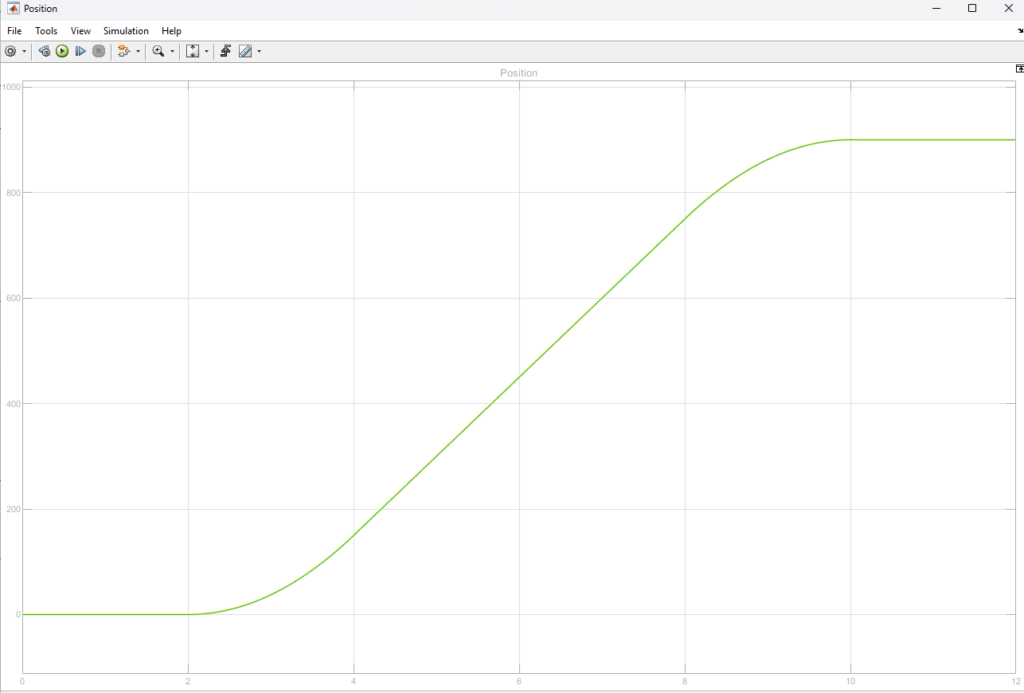
2. Geschwindigkeitsprofile
Geschwindigkeitsprofile ermöglichen die Steuerung von Beschleunigungs- und Bremsverhalten sowie der Endgeschwindigkeit. Durch Integration dieser Profile wird die Position berechnet, die dem Regler als Führungsgröße dient.
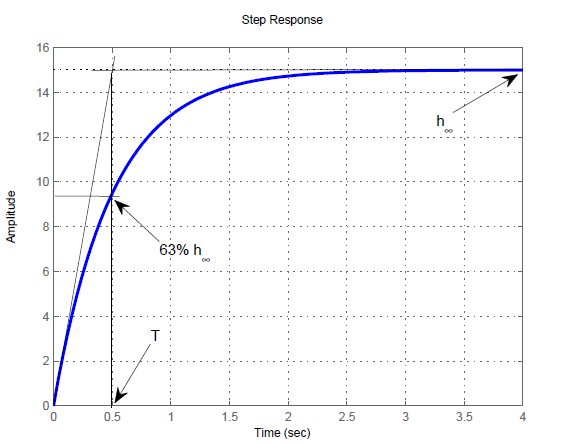
3. Systemidentifikation
Um den Regler zu simulieren und zu optimieren, muss das Verhalten der Micromouse zunächst identifiziert werden. Die DC-Motoren zeigen dabei das Verhalten eines Systems erster Ordnung. Die Systemparameter werden durch die Analyse der Sprungantwort ermittelt.
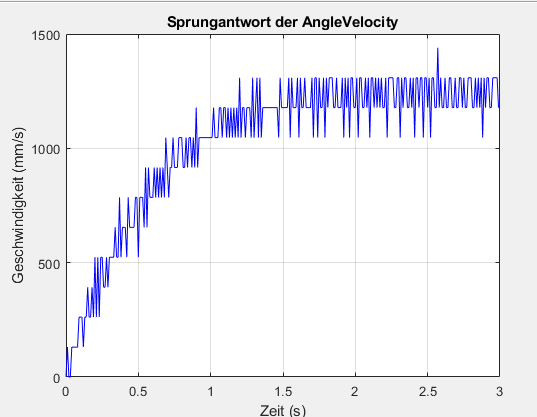
DC-Motor:
Winkel:
4. Tuning der PD-Regler
Basierend auf den ermittelten Systemfunktionen können die Parameter P (Proportionalverstärkung) und D (Differentialverstärkung) für die jeweiligen PD-Regler berechnet und optimiert werden. Dieser Prozess, bekannt als Regler-Tuning, zielt darauf ab, das bestmögliche Regelverhalten zu erzielen.