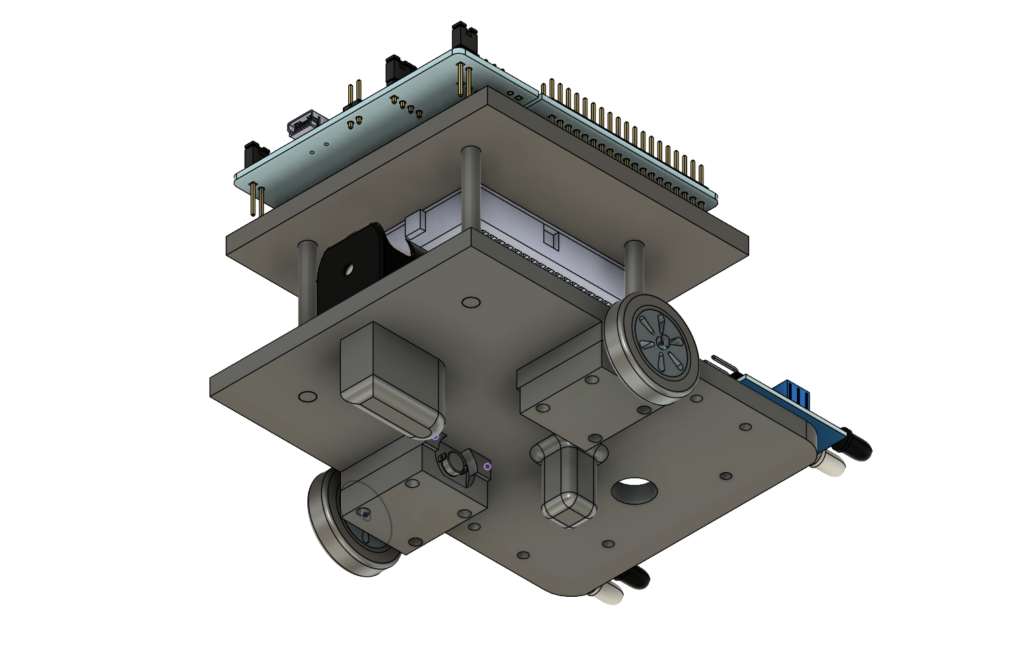
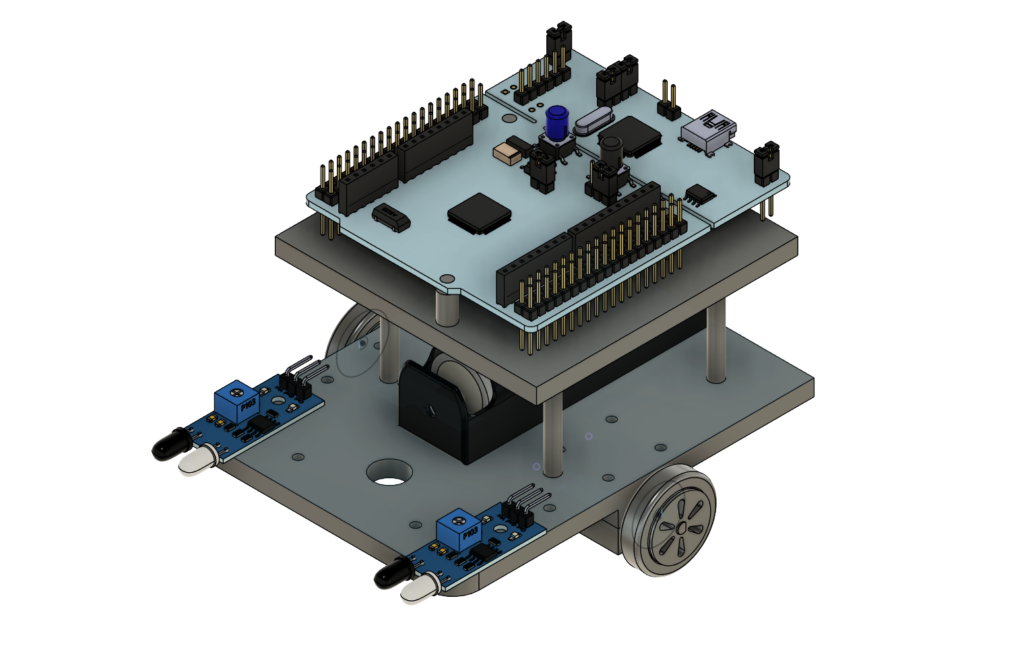
Prototyp
Unser Prototyp entstand aus der Idee nur Komponenten für die eigene Hardware zu verwenden, welche wir zuvor getestet haben.
Details…
Er besteht zu einem großen Teil aus Evaluation-Boards und 3D-Druck teilen. Das Design erinnert mehr an eine Micro-Mouse aus den Anfangszeiten, jedoch konnten wir mit ihm alle Bauteilgruppen verifizieren und sogar die meisten Softwaretests durchführen.
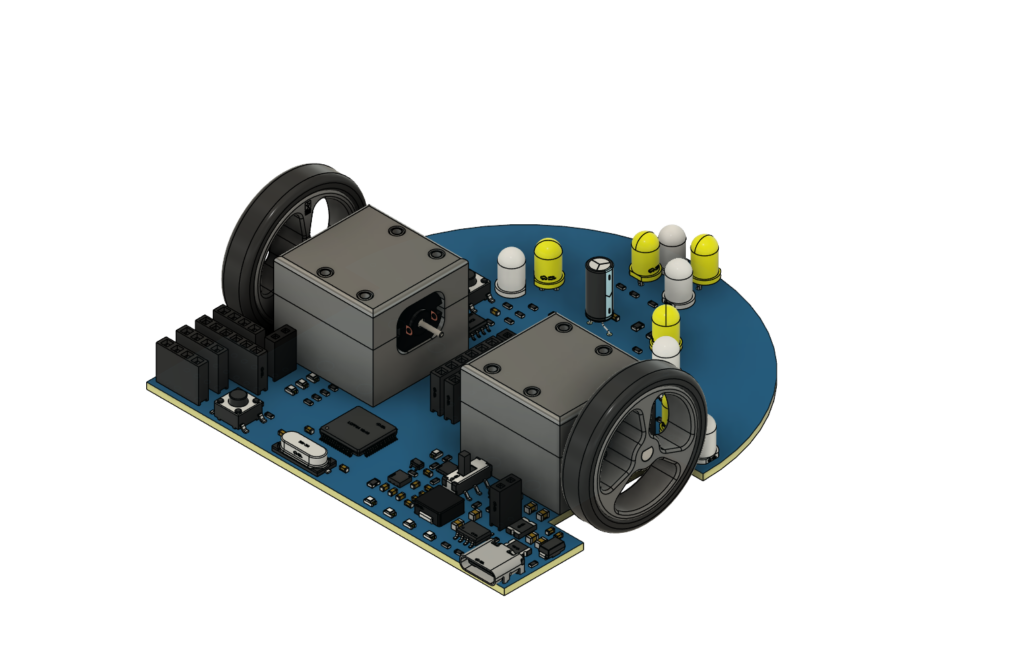
Micro-Mouse V1
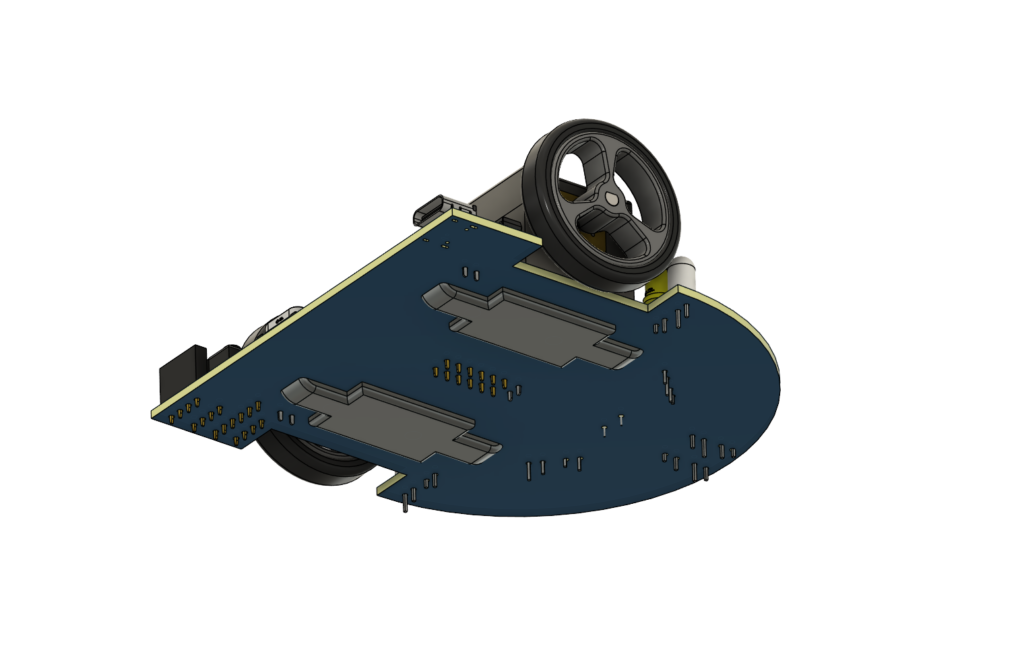
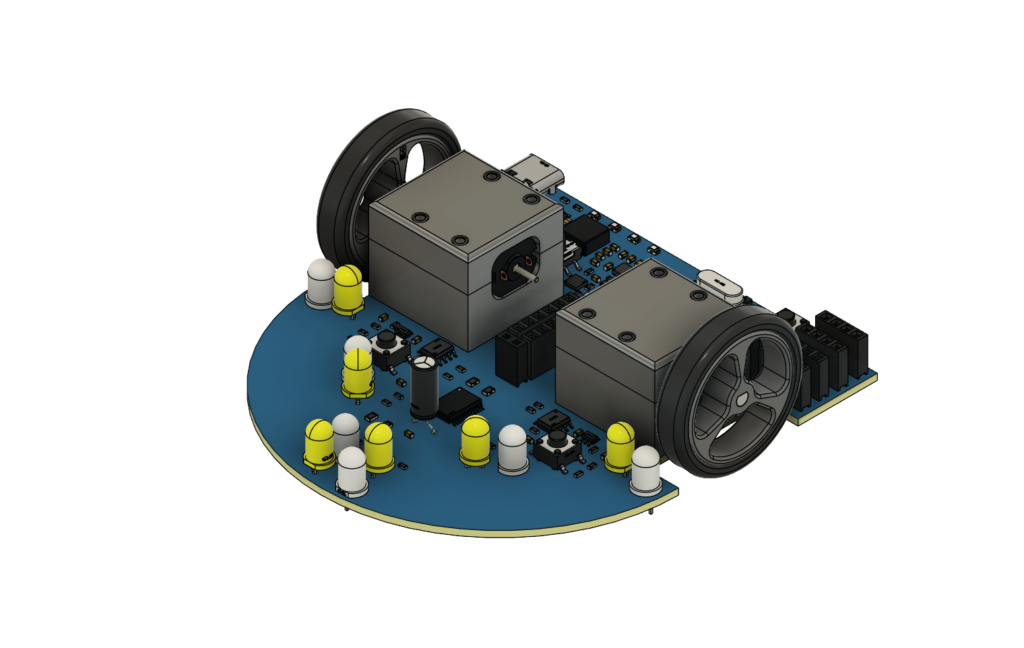
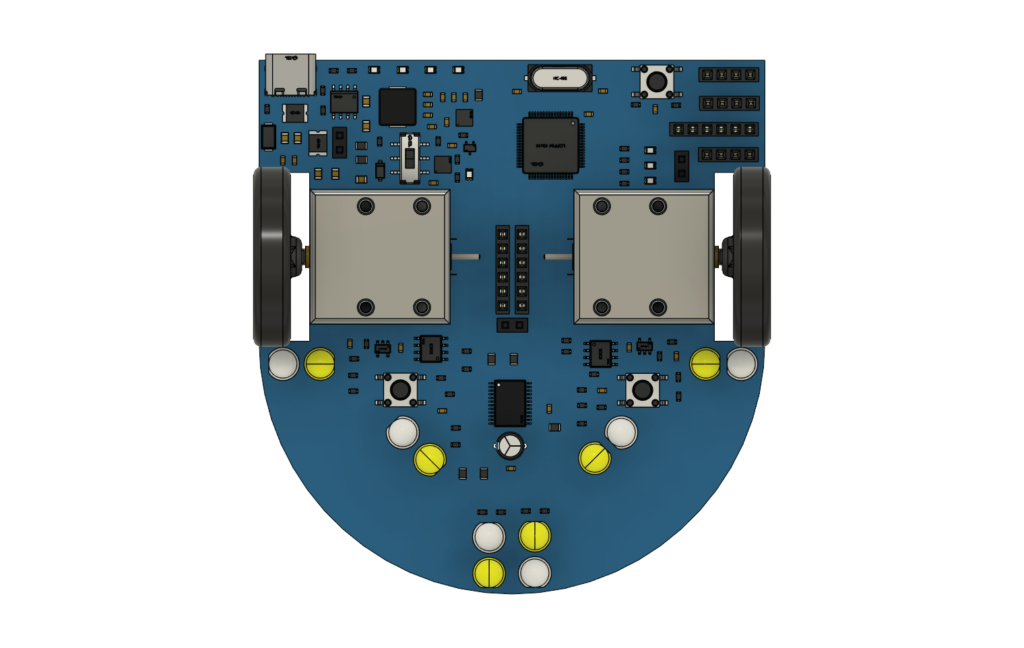
Erste Version der selbst entworfenen Hardware
Details…
Die erste eigene Hardware wurde basierend von den Schaltplänen der Evaluation-Board-Hersteller entwickelt und bietet neben den Grundfunktionen der Micromouse wie die Infrarotsensoren und Motorcontroller auch noch die Möglichkeit den Strom jedes Motors zu messen. Auf einen On-Board Debugger wurde verzichtet, dafür gibt es mehrere Schnittstellen um mit der Micro-Mouse zu kommunizieren.
Das Design ist in der Micro-Mouse Scene durchaus geläufig und Wettkampferprobt. Damit der mechanische Aufwand gering bleibt, wurde auf eine 2-Rad Variante gesetzt. Mithilfe der Schlitten auf der Unterseite wird ein Schwanken bei der Fahrt verhindert.
Controller
Das Herzstück der Micro-Mouse ist ein STM32F446, welcher einen Takt von 180 MHz besitzt. Eine schnelle Regelung ist die Grundvoraussetzung für eine wettkampftaugliche Maus, weshalb wir uns hier für den schnellsten 64 Pin Controller von STM entschieden haben. Er bietet genügend Peripherie, um alle Funktionsbereichen der Maus ansteuern und auswerten zu können.
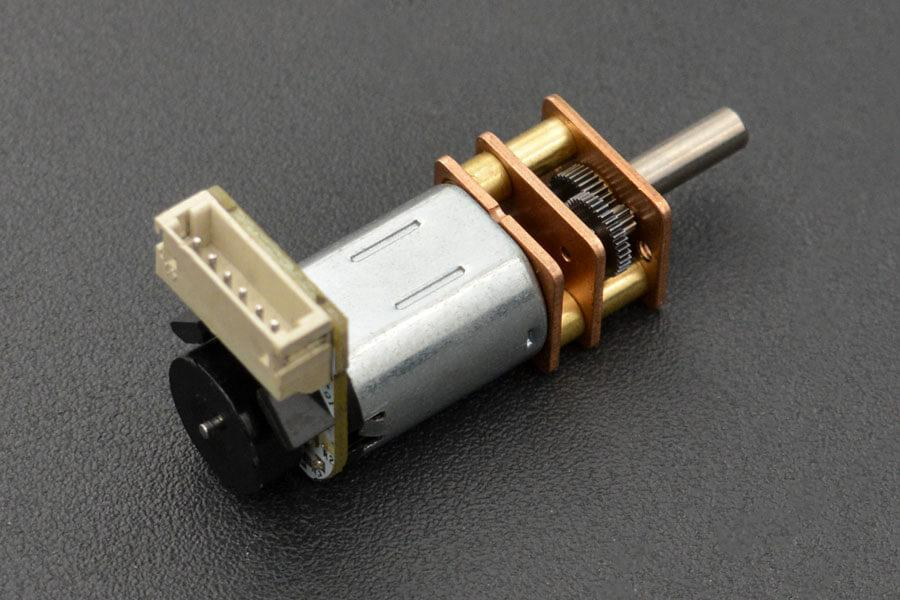
Antrieb
Zur Fortbewegung verwendet die Maus 2 kleine Gleichstrommotoren, welche mithilfe einer H-Brückenschaltung angesteuert werden. Mit den verbauten Hall-Feedback Encodern und den Stromsensoren, können wir die Motoren präzise Regeln. Sie besitzen eine Nenndrehzahl von 30.000 U/min, werden aber mithilfe von einem 10:1 Getriebe herabgesetzt, um genügend Drehmoment für die Beschleunigung zu erzeugen.